

How Could the Ark Avoid Being Capsized?
Preliminary sea trials indicate the superiority of a bow-mounted fin for directional stability. How could this be interpreted in the context of Noah’s Ark or ancient shipbuilding?
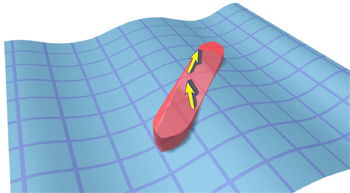
A bow-mounted rigid “sail” or fin demonstrated a significant steering effect. The optimum design would have the feature as far forward as possible (maximizing the yawing motion arm), relatively high (increasing the wind velocity and away from wave-induced air turbulence), high enough to avoid contact with waves, and as large as possible without compromising stability (wind heeling motion).
By maximizing the distance between the transverse area center of wind and water forces, the size of the features can be kept to a minimum while still achieving adequate yaw motion. With waves hitting the stern, the area would need to be shaped like the typical bow—some flare to deflect waves, relatively fine entry to cut through waves rather than ride over them. If the stern lifts too much, there is danger of broaching.
This tends toward an overhanging, vane-shaped feature at the bow and a submerged protrusion at the stern (like a skeg or fixed rudder).
Look familiar? It is reminiscent of the Mediterranean navy ships, such as this Greek Trireme.1

Interestingly, one striking feature of many ancient ships is the extreme upsweep of stem at the bow and stern, well beyond what would be needed for simply deflecting waves. One suggestion is that it is a tradition passed down from Egyptian reed boats with their anti-hogging tension rope pulling bow and stern together. For big wooden ships like the Greek Trireme, the passive storm seakeeping afforded by the bow-first behavior is a better explanation. It is highly unlikely that the engineering know-how behind these ships would have wasted so much effort (and weight) on a stern ornament.
Such widespread emphasis on the upswept stem could imply that
- They inherited the shape from Noah’s ark—the first ship in our history.
- They needed it for some reason, like storm seakeeping.
Direction-Keeping Features
Ever wondered why driftwood ends up sideways to the waves? The same thing happens to a drifting ship. There are well-established reasons why large waves tend to turn a ship side-on.
Broaching the Subject
Ships are longer than they are wide, which reduces drag and allows the vessel to ride through waves more comfortably and safely. The drawback is that the ship is in danger of capsizing when waves are side-on (beam sea or broadside to the waves). Broaching (turning of the ship to broadside) is the biggest risk for a ship in heavy seas, and loss of power (hence loss of control) can be a serious risk. So for a drifting ship like Noah’s ark, broaching risk must be addressed.
A major reference for ship design is the SNAME publication Principles of Naval Architecture. The following excerpts deal with yawing motions caused by waves. Following this, excerpts and diagrams (with permission) of Russian research on ship design with concern for storm seakeeping.
3.16 Yawing, Yaw-heel, Leeway, Broaching. Rotation of a ship about a vertical axis approximately through its center of gravity is called yawing. It is undesirable because its correction requires the use of a rudder with an increase in resistance to propulsion and because it produces yaw-heel, which thus far no stabilizing apparatus has been able to prevent. The deadwood and rudder of most ships of usual form are sufficient practically to eliminate yawing in still water, but among waves, a moving ship is subjected to forces and motions, which set up yawing. Three distinct types of forces and motions may be identified:
(a) The static pressure of the water, which often is not at the same level on the two sides of the ship
(b) Dynamic pressure forces caused by the orbital motion of the water in waves
(c) The gyrostatic couple due to imposition of rolling motion on a pitching ship.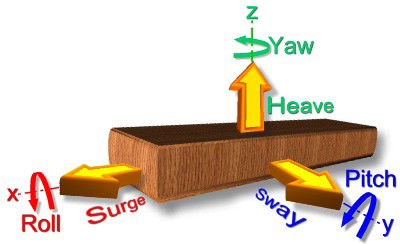
The six motions are yaw, heave, roll, surge, sway, and pitch.
Unless the ship is advancing exactly at right angles to the waves, the wave profile differs on the two sides of the ship, and in general, the longitudinal position of the center of pressure on one side of the ship is not the same as that on the other. This results in a couple producing rotation of the ship about a vertical axis. The direction of this couple changes as the waves move past the ship so that the rotary motion becomes an oscillation having the same period as the apparent period of the waves. Yawing from this source has its maximum amplitude when the ship’s course makes an angle of about 45 or 135 deg to the direction of advance of the waves, for then, the difference of the static pressure on the two sides of the ship is greatest.
Static Pressure (Hydrostatics)
It is convenient to treat the buoyancy of the fore and aft sections separately. In the following symmetrical cases, both buoyancy resultants are equal, but their placement and angle can vary.
When the ship is at right angles to the waves, there is no turning effect (yawing) since the fore and aft buoyancy forces are both vertical. The hull will experience bending motions due to hogging and sagging but no net yawing (turning) motion.
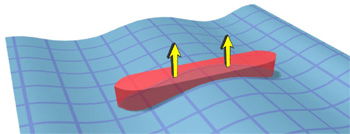
Hogging, 90 degrees to wave.
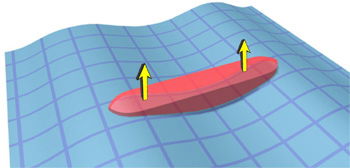
Sagging, 90 degrees to wave.
When the ship is 45 degrees to the waves, the buoyancy force at the bow is swinging the ship’s head to port. Assuming a worst-case wavelength, the stern will also experience a buoyancy force that pushes the stern to starboard. The net effect is a yawing motion, counterclockwise in this case. (Viewed from above.)
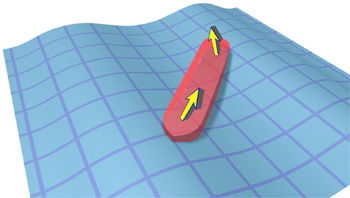
Sagging, 45 degrees to wave. Strong counterclockwise yaw.
Hogging, 45 degrees to wave. Weak clockwise yaw.
According to PNA, “The direction of this couple changes as the waves move past the ship, so that the rotary motion becomes an oscillation having the same period as the apparent period of the waves.”
However, when the buoyancy forces are viewed as a couple (separating fore and aft), it is clear that the yawing motion in sag will be greater than at the hogging condition because the motion arm is greater. Hence the “oscillation” of a strong counterclockwise yaw followed by a weak clockwise yaw will apply a net yawing motion counterclockwise. Hydrostatically, regular waves will turn any long floating thing sideways, especially if the wavelength is somewhere near the length of the vessel.
Orbital Motion
Water is not transported by a wave but moves in a circular path. Yawing is affected by the horizontal component of this orbital motion, which is zero halfway up the wave, maximum in the forward direction at the wave crest, and backward motion highest in the trough. This is an oscillating effect, which appears to be equal in either direction, so there should be no net yawing action over time. Orbital motion could contribute to a broach if it were possible to yaw the ship beyond the 45-degree hydrostatic maxima. However, the worst condition for hydrostatic yaw is when effective wavelength equals ship length, but for orbital yaw, effective wavelength equals 2 * ship length. So the critical wavelength for a combined effect should be somewhere between these two limits.
If a pitching ship is made to roll, as is the case when a ship advances obliquely to the waves, the axis of roll is not a fixed horizontal line in space but an axis which itself oscillates an amount equal to the angular amplitude of pitching. This oscillation of the axis of roll sets up a gyrostatic couple, which causes yawing. . . .
The direction of yawing produced by the gyrostatic couple depends upon the relation between the periods of the ship in rolling and in pitching and the apparent wave period. [In a condition] in which the period of waves is greater than the period of roll, results in yawing similar to that of the first case; the ship tends to place itself broadside to the wave crests and hollows.
Under conditions favorable for yawing the gyrostatic couple is seldom great and usually requires less rudder angle to control it than do other causes of yaw.
This condition will create a broaching effect. Some advantage might be gained by increasing the roll period beyond the wave period, usually to the detriment of outright roll stability. However, the PNA authors concluded that yawing due to gyrostatic couple is “seldom great.” However, in combination with the wavelengths stated previously (between 1 and 2 effective ship lengths), a roll period that is longer than the wave period might be prudent here. This could mean a reduction in outright stability in order to lower the roll restoration force. It also promotes a high roll inertia (mass moment of inertia) which could be achieved by loading toward the hull walls but with an open center, use of a heavy roof, and possibly adding mass at a distance, such as afforded by a tall mast.
Russian Design of a “Universal Vessel”
From Vasily N. Khramushin, Technical and Historical Analysis of Ship Seakeeping.2
There are more constraints applied to a commercial ship than Noah’s ark, notably the need for low drag in forward motion and the ability to navigate without resorting to changing course to a direct head sea (or following sea).
Khramushin gives historical examples of storm-suited ship designs, highlighting hull characteristics such as lateral asymmetry, rounded transverse hull shape, and methods of storm navigation by either head sea or following sea. For example, the Greek-style ship has a hull with a center of lateral resistance toward the bow and lateral wind resistance toward the stern. Obviously, the sail would be removed in a serious storm.
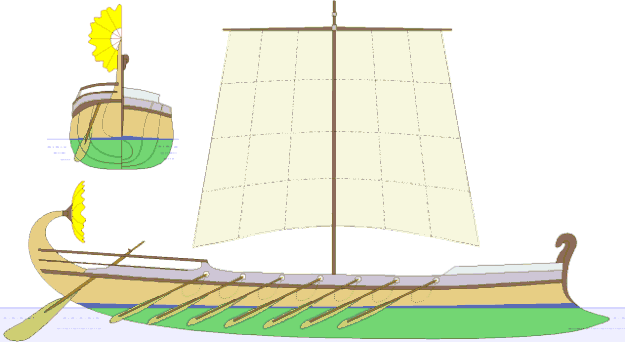
Head Sea. A depiction of the “ship of Argonauts,” which inherited the seaworthiness of Phoenician warships. The lateral asymmetry of the hull makes it naturally point into the wind, allowing bow-first navigation into a gale (head sea). Image credits: https://khramushin.narod.ru/Vlad_E1.html, used with permission.3
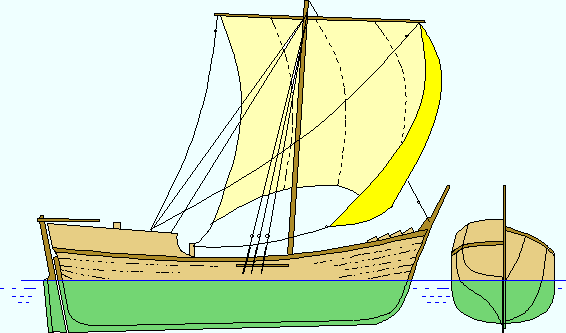

Following Sea. Fishing vessel of the Russian Pomors (coast dwellers known for daring Arctic voyages at the time of the Vikings). The hull form allows active maneuvering in gale seas with the storm sail and drag to stern allowing the vessel to run in a following sea.4
The following excerpt has been reworded by Tim Lovett. See Russian Original.5
According to Vasily N. Khramushin, the universal vessel addresses three interdependent constraints:
- Propulsive quality of the ship
- Stabilization of the hull
- Safety of navigation.
The solution considers real navigational issues such as storm conditions. In attempting to satisfy the above constraints while considering a historical analysis of ship design features, the following six concepts of the design are suggested:
- Shift of the center of buoyancy toward the bow, the protruding bulb advancing the dynamic center of lateral resistance. This will improve stability and will create the preconditions for safe storm navigation regardless of course.
- Reduction of the water plane in terms of area, cross and longitudinal moments of inertia, and the sharpening of stem at bow and stern. This reduces the wave loads in moderate seas and gives a low resistance in normal ocean navigation.
- Indention of the hull on the sides, but flared above the waterline, in the transverse section. This addresses the problem of storm conditions causing excessive accelerations and the impacts of waves both on the hull and on deck and also allows active management of the course of the vessel.
- Reduced volume of the bow and stern. If the transverse center of wind area is approximately amidships, it will improve storm controllability. But by reducing the sides of the hull at the waterline, the wave-induced motion is stabilized, without increasing tossing and hunting, because the hull will tend to pierce the waves.
- In balance with the previous point, there is a preference for keeping the above-water volume towards the stern (yet avoiding the use of a wide, flat transom). As a general rule, bow volume underwater and stern volume above the water, including after the stern perpendicular. Thus, the ship will safely ride out a storm with the bow pointing into the waves. This solution is suited to the typical storm but does not work in the unpredictable conditions at the center of a cyclone. The increased above-water volume at the stern and height of the quarterdeck does not hinder the effectiveness of motion and controllability (since the accelerated flow from the propeller “presses” the stern toward the average level of the waves).
- Reduced wind obstructions and lowered superstructures, housing appropriate cabins and rooms inside the streamlined hull. This fits the adage, “The beauty of the ship is defined by the absence on board of unnecessary things.” There is no need to alter course due to storms, and wind heel is minimized. While initial metacentric height is compromised, the hull is less sensitive to roll in waves. A further benefit is the rather unique ice-breaking solution that lifts the ice upward.
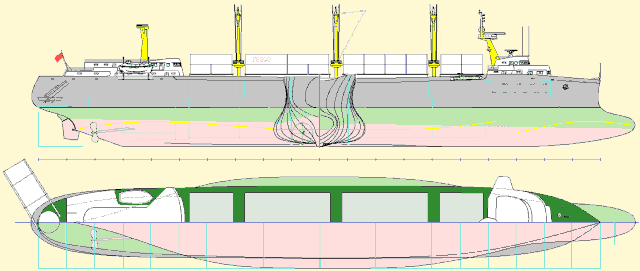
“Universal vessel”6
Broaching of a Large Ship
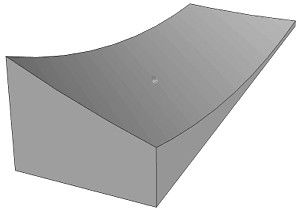
Assuming hydrostatic yawing to be a significant broaching factor in a heavy regular sea, then it might be possible to suggest an appropriate hull form. Minimizing the dominant yaw during sagging and maximizing the weaker restoring yaw when hogging might lead to a hull form more like a canoe and less like a block (low block coefficient). Reduced bow and stern buoyancy might minimize the dominant yawing action by keeping the buoyancy force close to amidships when riding a trough.
Minimize the dominant yaw in sag (ACW) and maximize the restoring yaw in hog (CW).
Conversely, a pure block shape would be expected to have a stronger tendency to broach. The hog condition would be unchanged since both hulls have a similar parallel mid-body. However, when the hull is bridging a trough (sag), the extremities on the hull acquire a large yawing motion. In this case, a full cross section is immersed in the steepest portion of the oblique wave, giving a significant increase in yaw motion (more than the corresponding volume increase since the wave is steeper toward the bow or stern).
Comparison of displaced volumes for half the hull at 45 degrees to wave in sagging (trough amidships)
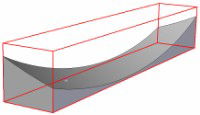
Highest broaching effect is expected with a block-shaped hull.
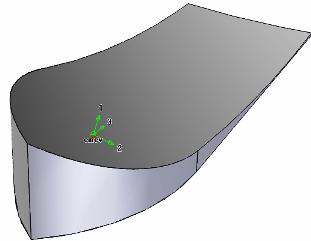
A finer bow and stern would reduce hydrostatic wave yaw.
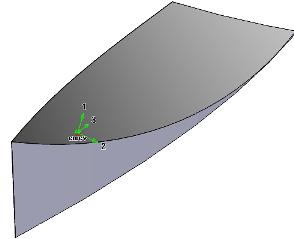
Lowest net hydrostatic broaching moment expected with a canoe-shaped hull.
No hull shape (where length is greater than width) would overcome the natural tendency to broach, but a minimal yawing motion will make it easier to keep the vessel perpendicular to the waves. With a weaker broadside pull, less effort is needed to steer the vessel using the lateral asymmetry between the center of action of the water and wind loads. There are several ways to achieve this directional effect, such as wind obstacles (sails or pronounced forecastle), trim by the stern (sitting lower at the stern and higher at the bow), sea anchors, or lateral water resistance at the stern (e.g., skeg, rudder, or other obstacle in the water).
The prescription for minimizing the risk of broaching is to have a relatively fine bow and stern without compromising buoyancy. This does not exactly favor a block-shaped hull. There are other factors in ship design, of course, but broaching is certainly a priority issue when waves are not trivial and the drifting vessel is six times as long as it is wide. Furthermore, accelerations increase as the hull approaches a more block-like form.
Compared to a typical ship, Noah’s ark has fewer demands compromising the design, such as drag. Broaching must be avoided in a following sea7 as a top priority, but no other heading would be desired or promoted in a drifting vessel. Also, the ark is not required to travel at speed. While outright stability is important to avoid capsizing by a broadside wave, it would be logical to minimize accelerations also, which is something of a compromise.
Sudden Broaching
A following sea can be dangerous. With insufficient bow buoyancy, a large wave approaching from behind can lift the stern and drive the bow into the water. This can result in a sudden broach and even capsize.

A fishing vessel in a following sea, image source: NOAA.gov
The risk of broaching in these conditions can be lessened by avoiding a wide, flat transom, reducing stern buoyancy, and increasing bow buoyancy. A finer stern (double ender) helps too, approximating the bow of a ship in a head sea.
Maintaining Heading into the Waves
The worst thing to happen in heavy seas is to have the ship turn side-on to the waves, which can capsize even a large ship under certain conditions. During a serious storm, the bow is usually kept facing into the wind, the ship sometimes going backward. Even ancient ships show features designed to avoid broaching.8
Noah’s ark was not a cube, which handles waves equally from all directions. The dimensions given in Genesis 6:15 describe a hull six times as long as it was wide, proportions very close to a modern ship. This means it should avoid a beam sea (side-on to the waves) when conditions are rough. Heavy seas would be expected in the worldwide flood—especially during the wind stage (Genesis 8:1).
A ship without power is vulnerable since the heading cannot be maintained by propulsion. In this case, a sea anchor could be used. This is effectively an underwater parachute that pulls on the bow of the ship as the wind and waves push the vessel backward.
It is important to remember that waves do not transport the water but oscillate it in one spot, or nearly so. Although the waves appear to move past the ship, the water itself is almost stationary, so a sea anchor will tend to hold its position. Although effective, a sea anchor requires attention because ropes have a tendency to get tangled up, and waves are not always coming from the same direction. A variation on the theme is the drogue, which is designed to be towed behind the ship in a following sea and pulls on the stern to improve directional stability. In contrast, the sea anchor is attached to the bow and has a much higher drag. Maintenance of a sea anchor would be labor intensive, and floating debris, such as tree logs, would also be a significant problem.
Transverse Asymmetry
To get the ark to act like a weather vane and keep itself in line with the wind, the stern could drag in the water and the bow catch the wind. The stern drag might be generated by protruding features of the hull itself (logs etc.) or simply a less streamlined design. The bow would need some sort of obstacle to the wind—perhaps a fin, as shown at the Ark Encounter.
If the wind has turned the ark (broaching) side-on to the waves (beam sea), there is a risk of capsizing. The simplest way to get a symmetrical vessel out of this situation is to have a significant amount of trim (slope of the ship in the water from bow to stern, usually due to uneven loading). For example, trim to stern will sit the stern deeper in the water and allow the bow to catch more air and less water, swinging it around. The effectiveness of this arrangement will depend on the relative differences in the bow and stern profile underwater, which defines the location of the center of transverse water pressure with respect to the transverse center of wind load. Even without deliberate buoyancy difference between the bow and stern, trim could be achieved simply by loading heavy cargo toward the stern.
Surfing and Wave Celerity
A skeg-based design will travel faster than a deliberately dragging stern, which may (or may not) lead to the dangerous quartering condition where the ship almost begins to “surf” with a wave. Surfing is dangerous because the vessel is unstable and needs to be controlled (ever tried surfing?). The answer lies in the relative speed of the vessel driven by the wind compared to the apparent speed (celerity) of the waves. In the open sea, with large well-developed waves, the distance between waves (wavelength) is long. Wave speed increases with wavelength, so the wind-driven waves of the later stages of the flood would be expected to travel relatively fast compared to the speed of the vessel. Dr. Allen Magnuson estimates only a few knots for the wind-driven ark. The high speed and low gradient of deep-sea waves are why you only see surfers near shallow water where waves have slowed and become steeper.

Dr. Allen Magnuson, Ph. D., P.E.9 researched a potential hull shape for Noah's Ark and investigated wooden ship construction and internal structural layouts.
Before I was saved in 1987, I was substitute Sunday school teaching from Genesis 6. At the time I considered the book of Genesis to be an allegory or legend. While I was preparing the lesson, I realized that the Ark’s dimensions and proportions as given in Genesis 6:15 were those of a modern cargo ship. It became clear to me at that point that God designed the Ark as a seagoing ship with the animals as the cargo. This was a strong factor in my decision for Christ. I publicly accepted Christ as my personal Savior shortly after this. (July 20, 2005)
This means the stern is doing all the work cutting through the passing waves, which is normally the job of the bow.

Strong winds are pushing the ark to the right of the picture. A wave has just passed the stern. Image credit: Tim Lovett, 2004. No anti-broaching features are shown here.

The American clipper Ringleader, built in 1853. Painting by A. V. Gregory showing the ship in the South Atlantic “riding her easting down.” In the heavy sea and strong wind, there is a risk of broaching. The sails are concentrated toward the bow with the mizzen (third) mast completely bare, which helps to keep the vessel pointing with the wind.

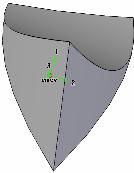
Skeg and forecastle design. Image source: Allen Magnuson, 2005.
The raised area of the bow (forecastle) is pushed by the wind while the fin-shaped keel at the stern (skeg) keeps it from going sideways. The skeg has a similar effect to the fin of a surfboard—it inhibits sideways motion in the water. This is a standard design for a boat hull, used in combination with cut-up (rising bottom) toward the stern.
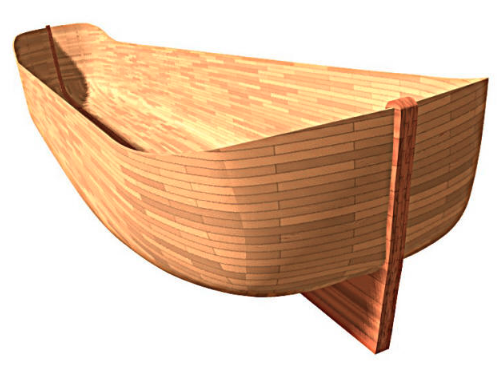
The skeg feature for lateral water resistance at the stern improves directional stability. Image source: Allen Magnuson, Tim Lovett, 2005.
This general arrangement is found on most modern ships, except that the typical bulk carrier is in reverse. The superstructure is at the stern which helps to “steer” the vessel with the bow pointing toward the wind. If the superstructure were at the bow, wind and waves would tend to push the bow behind the stern, which is a broaching action. See also https://answersingenesis.org/noahs-ark/proportions-of-a-real-vessel/ for other ways to address proper alignment of the vessel in rough sea, showing yet again that the biblical details of Noah’s ark could absolutely make for a seaworthy vessel, even in rough seas.
Answers in Depth
2025 Volume 20
Answers in Depth explores the biblical worldview in addressing modern scientific research, history, current events, popular media, theology, and much more.
Browse VolumeFootnotes
- Lewis, Edward V. 1988. Principles of Naval Architecture: Volume III – Motion of Ships in Waves. Alexandria, VA: Society of Naval Architects and Marine Engineers.
- Khramushin, Vasily N., Technician-History Analysis of Ship Seakeeping, accessed December 2024, https://khramushin.narod.ru/Vlad_E1.html.
- “You can use completely freely any materials, figures or the programs published on our site ‘Science’,” (www.Science.Sakhalin.ru); Vasily N. Khramushin Academic secretary of Sakhalin Division of Russian Geography Society, Head of Computational Fluid Mechanics and Oceanography lab. Special Research Bureau for Automation of Marine Researches, Far Eastern Branch of Russian Academy of Sciences, http://www.Science.Sakhalin.ru/ocean, accessed April 2005. See also https://khramushin.narod.ru/Khram/index.html.
- Ibid.
- Russian original: Vasily N. Khramushin, Технико-исторический анализ мореходности, accessed January 2025, https://khramushin.narod.ru/Vlad_R1.html.
- See reference 3.
- Noah’s ark in a “following sea”: We have adopted the term “following sea” where the “stern” of Noah’s ark should face the wind and the “bow” is supposed to point away from the wind. Alternatively, it could be considered as a “head sea” situation with the vessel running backward, swapping the bow and stern definitions around. For the sake of consistency, we will define the bow and stern in terms of the ark running in a following sea (traveling forward with the wind).
- Khramushin, Technician-History Analysis of Ship Seakeeping.
-
- B.S. University of Michigan (1964), Naval Architecture and Marine Engineering; M.S. Penn State (1967), Aerospace Engineering; Ph.D. University of New Hampshire (1972), Applied Mechanics
- Associate Professor, Texas A & M Civil Engineering Dept (Ocean Engineering Program) 1983–1987; Associate Professor (with tenure) Virginia Tech, Aerospace and Ocean Engineering Dept. 1977–1983; Naval Architect (Researcher), Ship Dynamics Division, Hydrodynamics Laboratory, Naval Surface Warfare Center, Bethesda, MD, 1964-1968 and 1973-1977; Supervisory Naval Architect, Portsmouth (N.H.) Naval Shipyard, 1968-1970


Support the creation/gospel message by donating or getting involved!

Answers in Genesis is an apologetics ministry, dedicated to helping Christians defend their faith and proclaim the good news of Jesus Christ.
- Customer Service 800.778.3390
- Available Monday–Friday | 9 AM–5 PM ET
- © 2026 Answers in Genesis