

Is Gravity a Force?
Flat-earth proponents aim to demote gravity as a force, but they fail to account for time-honored conventions in physics informed by relativity.
Flat-earthers are fond of dismissing gravity by quoting prominent physicists saying that gravity is not a force. “What!?” you may ask. When did this change? And if gravity is not a force, what is it? The change supposedly happened more than a century ago when Albert Einstein published his general theory of relativity. Unfortunately, it will take a bit of discussion to get to the heart of the matter.
Special Theory of Relativity
The negative result of the Michaelson-Morley experiment requires an explanation.
In a pair of recent articles, I discussed geocentrism. In the first article, I gave a brief history of man’s concept of motion, and I gave early evidence that the earth both rotates and revolves. In the second article, I described the rise of the modern geocentric movement in the late 20th century, along with some of the physical and biblical arguments that geocentrists often use to support their cosmology. The second article necessitated discussion of Albert Einstein’s theory of special relativity. Special relativity explains the discordant results of various interferometry experiments conducted in the late 19th and early 20th centuries. The key experiment was the 1887 Michaelson-Morley experiment that attempted to measure the speed of light in different directions. Classical physics required that light have a medium to travel in, even in the emptiness of space. Therefore, physicists proposed that space is filled with a mechanical medium that they called aether. Classical physics predicted that the measured speed of light depends upon which direction one measured it, either along the direction of the earth’s orbital motion or perpendicular to that motion. The Michaelson-Morley experiment tested this prediction. The astonishing result was that the speed of light was the same in all directions. Modern geocentrists believe that the Michaelson-Morley experiment proves the earth isn’t moving. However, there is abundant evidence that the earth is moving. Therefore, the negative result of the Michaelson-Morley experiment requires an explanation.
Einstein’s elegant solution to this problem came from an observation about electricity and magnetism that others ought to have realized sooner. Two decades before the Michaelson-Morley experiment, James Clerk Maxwell had published a set of four equations describing all aspects of electricity and magnetism, unifying these two different phenomena into a single coherent theory. One consequence of this theory is that electromagnetic phenomena are invariant with respect to motion. For instance, a coiled wire moved with respect to a stationary magnet will experience an induced current. However, if the magnet is moved while the coiled wire remains at rest, the coil will experience the same induced current. The same is true of mechanics, the branch of physics concerned with motion. Mechanics is invariant with respect to the motion of the observer, meaning that observers moving with respect to one another will interpret motion of other objects the same way. The invariance of electromagnetism with respect to motion includes the motion of the observer.
Rather than the result of the Michaelson-Morley experiment being a contradiction of physics, its result is what one expects if one properly understands physics.
When one solves all four of Maxwell’s equations simultaneously, the result is a wave that travels perpendicular to the plane of mutually perpendicular oscillating electric and magnetic fields with a speed that accurately matches the measured speed of light. Immediately, Maxwell and others realized that this wasn’t a coincidence, but that this must be the mechanism of how light propagates. Thus, oscillating electromagnetic fields seemed to provide the medium for light to travel. Still, for 40 years physicists continued believing in the mechanical medium of aether. Einstein was one of the first to fully realize oscillating electromagnetic fields as the medium for light (rather than a mechanical aether) and to combine this understanding with invariance of electromagnetic phenomena. Once he understood that, it was inevitable that recognition of the invariance of the speed of light with respect to motion of either the source or the observer of light followed. If the speed of light depended upon the velocity of the source or observer of light, then that would violate the invariance of electromagnetic phenomena. Therefore, rather than the result of the Michaelson-Morley experiment being a contradiction of physics, its result is what one expects if one properly understands physics.
In the second article, I briefly mentioned general relativity, Einstein’s follow-up to his special theory of relativity a decade later. In that second article, I mentioned that the special theory of relativity treated objects moving at constant velocity, while the general theory of relativity treats accelerating objects. Beyond that, I didn’t say much more about general relativity. For instance, I could have pointed out that general relativity also incorporates gravity, as well as space and time. Here I will more fully discuss the reasoning behind general relativity. However, this will not be a technical or comprehensive discussion.
Frame of Reference
In yet another article, I discussed inertial and non-inertial reference frames. A frame of reference is a coordinate system that we can use to express the locations of objects or events in physics. The best example of such a system is a Cartesian coordinate system, x and y axes that are mutually perpendicular. Such a coordinate system is 2-dimensional and is very useful in describing many physical situations. If a third dimension is necessary, then we can add a z-axis that is perpendicular to the original 2-dimensional one, with the origin of all three axes at the same point. Since we live in a 3-dimensional world, a 3-dimensional Cartesian coordinate system can describe any situation we might imagine. Note that all three coordinates, x, y, and z, are functions of time (which introduces a fourth dimension—more about that later). For the time being, I will restrict my discussion to two dimensions, realizing that it is relatively easy to add the third spatial dimension when necessary.
The choice of coordinate systems is entirely arbitrary. See figure 1. Suppose that I am at the origin of a Cartesian coordinate system, and I observe an object located at the point indicated by the ordered pair (x0,y0) at time t = 0. If the object is moving with velocity components vx and vy, then at any time t > 0, I will see the object at the ordered pair (x,y), with
- x = x0 + vxt
- y = y0 + vyt.
This Cartesian coordinate system is my frame of reference.
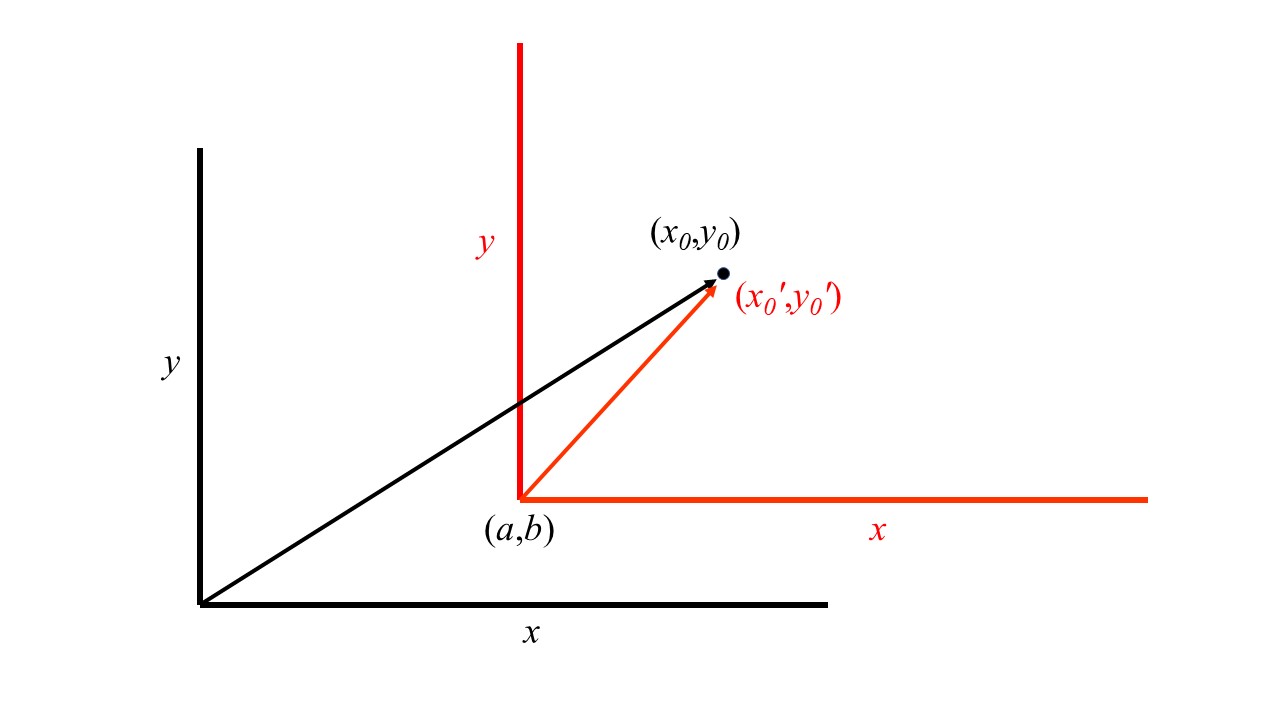
Figure 1. Sample coordinate system
Now suppose that a friend is located at the ordered pair (a,b) and that he defines a Cartesian coordinate system with the origin at his location. This is his frame of reference. Let ordered pairs in his coordinate system be indicated by primes. Therefore, in his coordinate system the object will be located at (x0',y0') at time t = 0, and at time t, the object will be located at (x',y') with
- x' = x'0 + vxt
- y' = y'0 + vyt.
We can relate coordinates between these two reference frames via
- x' = x – a
- y' = y – b.
I could add the possibility of acceleration of the object by treating its acceleration in two components ax and ay. If so, then
- vx = vx0 + axt
- vy = vy0 + ayt,
where vx0 and vy0 are the components of velocity at time t = 0. Similarly,
- x = x0t + ½axt2
- y = y0 + vy0t + ½ayt2.
As before, we can transform from my reference frame to my friend’s reference frame using the second pair of equations above. What if I wish to go the opposite direction, from my friend’s reference frame to my frame of reference? We can algebraically manipulate the second pair of equations above to get
- x = x' + a
- y = y' + b,
from which I can transform in the opposite direction.
Rather than my friend being stationary with respect to me, we can add the situation of my friend moving with a constant velocity. Let my friend’s position in my frame of reference at time t = 0 be (a,b), and let his velocity with respect to me have the components ux and uy. Then my friend’s location at any time t in my frame of reference will be
- x = a + uxt
- y = b + uyt.
Substitution of these last relationships into the earlier equations will describe all transformations between these two frames of reference.
Inertial Vs. Non-Inertial Reference Frames
Sir Isaac Newton deduced three laws of motion. Those three laws are:
- An object at rest will remain at rest and an object in motion will continue in straight-line motion unless an outside force acts upon it.
- When a force acts on an object, the object will experience an acceleration directly proportional to the force and inversely proportional to the object’s mass.
- For every action (force) there is an opposite but equal reaction (force).
The study of how these three laws of motion play out in the world is called mechanics. In mechanics, it doesn’t matter which reference frame we use—we will get the same results. I kept the choice of reference frames general, subject only to the stipulation that neither reference frame was accelerating with respect to the other. We call these reference frames inertial frames because inertia, another term for mass, behaves in a way describable by Newton’s laws of motion. What happens if one reference frame accelerates with respect to the other? We will not get the same results. To transform from the non-accelerating frame to the accelerating frame will require additional terms involving the acceleration of the accelerated frame.
The observer at rest outside the airplane can explain all that he sees in terms of Newton’s three laws of motion. However, the people inside the airplane will perceive that a fictitious backward force is at work to explain what they see.
Here is a classic example. Suppose you are seated on an airplane that is accelerating for takeoff. You will feel yourself pushed back into the seat, which you would interpret as a force. This happens so frequently that we don’t think much about it. If there is something loose in the airplane, such as a ball in the aisle, it will appear to roll backward in the cabin with increasing speed. That is, the ball seems to be undergoing an acceleration backward down the aisle. From Newton’s second law, we would understand that this would require a force. Presumably, that force is the same force that is shoving passengers back into their seats. What if someone stationary to the ground outside the airplane could watch the progress of the ball, say through the windows of the aircraft cabin? That observer would not see the ball move at all. What he would see is the airplane accelerate forward while the ball remained stationary. This situation would change once the back of the cabin collided with the ball, compelling it at last to join the acceleration of the rest of the airplane. Meanwhile, people aboard the plane would observe the ball cease accelerating down the aisle when it slammed into the back of the cabin. To make sense of all of this, people in the airplane likely will invoke some force responsible for the action of the ball and the sensation they have with the back of the seat. They will perceive that there is some force acting on everything in the plane, a force pushing everything backward. Meanwhile, the person outside the airplane would see the force produced by the airplane’s engines accelerating the plane and its contents forward as being responsible for all that they see. Who is seeing the situation properly? The observer at rest outside the airplane can explain all that he sees in terms of Newton’s three laws of motion. However, the people inside the airplane will perceive that a fictitious backward force is at work to explain what they see.
Another example is even more familiar. Suppose that a person driving a convertible with the top down rounds a curve. The driver of the car will feel a “force” slinging him the opposite direction of the turn. The driver has various countering forces that prevent him from flying to the side of the car on the outside of the curve: safety restraints, friction from the seats, and gripping the steering wheel. However, objects sitting on the seat next to him may not be so constrained and so would slide outward across the seat. We usually attribute this to centrifugal force. However, suppose a utility worker is in a bucket above the turning convertible. He would see the object sliding on the seat continuing forward in a straight line as if no force is acting on it in accordance with Newton’s first law. On the other hand, the utility worker would see the car and its driver turn around the curve, which, according to Newton’s second law, requires a force. For the car, friction between the tires and road provides that force. For the driver, it is the safety restraints, seat friction, and gripping the steering wheel that provide the force.
How can we tell if we are in a non-inertial reference frame rather than an inertial reference frame?
Notice that in either example, the vehicle and the people inside the vehicle were experiencing an acceleration. In the case of the airplane, the acceleration was linear, that is, along a straight line. In the example of the convertible, the acceleration was circular. A person in an accelerating reference frame must modify Newtonian mechanics by adding a fictitious force that is not necessary in inertial reference frames. Because of this difference, we call accelerating reference frames non-inertial reference frames. How can we tell if we are in a non-inertial reference frame rather than an inertial reference frame? Non-inertial reference frames will require the creation of fictitious forces, with the fictitious forces being directly proportional to mass. This is because of Newton’s second law: in figuring the acceleration, the mass drops out so that all objects experience the same acceleration. Normal, non-fictitious forces don’t act this way.
Since the earth rotates each day, there is a circular acceleration present, so the earth is not truly an inertial reference frame. However, the amount of centripetal (center-seeking) acceleration on the earth’s surface is relatively small, so for most purposes we can treat the earth as an inertial reference frame. The deviation from the earth being a true inertial reference frame is significant only in some of the most sensitive experiments. It also shows up in the Coriolis effect and the Foucault Pendulum.
General Relativity
Like gravity, fictitious forces in non-inertial reference frames are proportional to mass. This suggested that gravity might be a fictitious force.
Note that fictitious forces in non-inertial reference frames are observed to be directly proportional to mass. So is gravity. Sometimes we say that mass as defined by Newton’s second law of motion is the inertial mass. If we wish to determine an object’s inertial mass, we subject the object to a force, measure the resulting acceleration, and divide the force by the acceleration to determine its inertial mass. We say that mass as defined by Newton’s law of gravity is the gravitational mass. To determine an object’s gravitational mass, we weigh it. We observe that inertial and gravitational mass are the same. Why is that? In Newtonian mechanics, the two types of masses are just the same. It works out nicely because objects fall at the same rate regardless of mass, but there is no reason why they ought to be the same. Einstein thought this might not be a coincidence. Like gravity, fictitious forces in non-inertial reference frames are proportional to mass. This suggested that gravity might be a fictitious force. However, gravitational force exists in what normally appears to be inertial frames of reference, where there are no fictitious forces. This recognition is called the equivalence principle.
The equivalence principle allows us to use acceleration to create artificial gravity. Suppose a space station consists of a pressurized tube curved into the shape of a circle. If the circle is spun like a wheel, then astronauts in the space station will be slung outward toward the outer edge of the inside of the tube. This outer edge will amount to a floor that the astronauts can walk on. If the outer radius of the space station is R and the acceleration of gravity is g, and the rotation period of the space station is T, then the astronauts will experience a centrifugal force equal to that of gravity on earth if

This artificial gravity would be indistinguishable from what we experience on the earth’s surface. This situation is similar to the turning convertible. What about linear acceleration, such as with the airplane taking off? Suppose an astronaut is aboard an accelerating rocket. If the rocket accelerates at the observed acceleration of gravity on earth (9.8 m/s2), then the astronaut will feel as if he is accelerated downward as he is on earth. These considerations reveal that it is difficult to know whether one is experiencing a force of gravity or is merely in an accelerated reference frame.
According to the equivalence principle, free fall is an inertial reference frame.
One implication of the equivalence principle is that free fall is an inertial reference frame. People frequently say that astronauts orbiting the earth are weightless, as if they are not subject to gravity. This is not correct. It is gravity that causes astronauts to orbit the earth. However, astronauts orbiting the earth are continually in freefall around the earth. When continually falling, astronauts don’t feel as if they have any weight. This feeling is very different from our everyday experience on the earth’s surface—the earth’s surface prevents us from falling freely. It is this feeling of “weightlessness” that brings pleasure to many people when they briefly experience it on some amusement park rides (though some people find it uncomfortable and even get sick when they experience it). The free-fall reference frame of the International Space Station provides an excellent inertial reference frame, even though from our viewpoint on the earth it is accelerating. But again, according to the equivalence principle, free fall is an inertial reference frame. This suggests that in some way a reference frame that is subject to gravity but prevented from falling (by, say, being on the earth’s surface) is not an inertial reference frame after all.
This reasoning allowed Einstein to see that gravity could (notice the conditional word, could) be viewed as a fictitious force arising in a non-inertial reference frame. If a person in free fall is in an inertial reference frame, then a person standing on the earth’s surface is not in an inertial reference frame. Hence, the person standing on the earth must hypothesize a fictitious force that he calls gravity. Expressing this mathematically requires a four-dimensional reference frame, one consisting of the three dimensions of space plus the dimension of time. To distinguish this four-dimensional space from the normal three-dimensional space, the new four-dimensional space often is called spacetime. In this view, objects with no net force acting on them move at a constant velocity through spacetime. These straight paths are called geodesics. The presence of matter bends spacetime. Objects moving along their geodesics in curved spacetime appear to us to be accelerating. This explains how gravity operates at a more fundamental level than Newtonian gravity does. But general relativity doesn’t tell us what gravity is. Like Newtonian gravity, general relativity merely describes how gravity behaves.
Conclusion: Gravity as a Force Still Very Active
In general relativity, gravity is a fictitious force. So, does this mean that gravity is not a force at all? Despite flat-earthers’ glee in pronouncing the death of gravity as a force, reports of gravity’s death have been greatly exaggerated.1 If you pick up any general physics textbook, you will find that gravity is called a force early in the book and subsequently treated as a force throughout the book. Very late in the textbook, you may find discussion of the four fundamental forces, with gravity being one of the four fundamental forces. Thus, for every quote flat-earthers can find of physicists saying gravity is not a force, I can probably find at least a hundred quotes from physicists to the contrary. Is this a contradiction? Not really. In physics we often can look at situations more than one way. For instance, we frequently solve mechanics problems using forces and accelerations, but we often can solve the same problems using conservation of energy. Which is the better way to solve the problems? It doesn’t matter, though the energy constraint method generally is easier because energy is a scalar and force and acceleration are vectors.
Perhaps a better example of how physicists look at phenomena two very different ways is our understanding of light. In classical mechanics, something can be a particle, or it can be a wave, but it can’t be both. Yet, we have ample evidence that light has both a wave and particle nature. Hence, in quantum mechanics we have resolved ourselves to knowing that light is both a wave and a particle. For that matter, particles, such as electrons, have a wave nature too. This wave-particle duality is a contradiction in classical mechanics, but not in quantum mechanics. Quantum mechanics and general relativity are the twin pillars of modern physics. While general relativity does not treat gravity as a force, quantum mechanics does treat gravity as a force. This is the basis for considering gravity a fundamental force. Fundamental forces are mediated by the exchange of particles. Particles that interact via fundamental forces exchange other particles called gauge bosons. Photons are the gauge bosons that particles exchange to mediate the electromagnetic force.
The hypothetical gauge boson that mediates the gravitational force is the graviton. However, unlike the gauge bosons that mediate the other fundamental forces, the graviton has not been detected. Part of the problem is that because gravity is by far the weakest of the fundamental forces, the graviton is extremely difficult to detect. But the greater problem is that we don’t yet have a quantum theory of gravity that we can use to predict the properties of the graviton. There are several impediments to development of a theory of quantum gravity. One is the fact that a successful quantum theory of gravity must also incorporate general relativity. No one has any idea how to do this. Until such unification is done, both quantum mechanics and general relativity are incomplete theories. Since both theories are incomplete, we ought not to impose some aspects of one theory (such as gravity not being a force) onto the other. Until then, rest assured that gravity is a force, even though in general relativity it is not a force.
Footnotes
- Flat-earthers usually try to derail any discussion involving gravity by asking which theory of gravity we are talking about. If one says that it is Newtonian gravity, then the flat-earthers swoop in with the claim that general relativity superseded Newtonian gravity more than a century ago. This is followed by an admonishment to get up to speed with the proper theory. This implies that the flat-earthers involved know all about the physics of gravity, which decidedly is not the case. If they did, then they would certainly understand that in most cases, such as those on the earth, it doesn’t matter a whit which theory one uses because the results are the same. This distraction is nothing less than a cheap debate tactic.

Support the creation/gospel message by donating or getting involved!

Answers in Genesis is an apologetics ministry, dedicated to helping Christians defend their faith and proclaim the good news of Jesus Christ.
- Customer Service 800.778.3390
- Available Monday–Friday | 9 AM–5 PM ET
- © 2026 Answers in Genesis